團(tuán)隊(duì)簡(jiǎn)介:團(tuán)隊(duì)面向國(guó)家戰(zhàn)略需求和廣西丘陵山區(qū)農(nóng)業(yè)機(jī)械化的發(fā)展需求��,在甘蔗全程生產(chǎn)機(jī)械��、木薯收獲機(jī)械和水稻種植機(jī)械等方面�����,運(yùn)用先進(jìn)的設(shè)計(jì)理論和方法����,開展科學(xué)研究,解決了一系列關(guān)鍵技術(shù)和基礎(chǔ)性理論難題����,并自主研制了立式超深旋耕(粉壟)機(jī)、甘蔗種植機(jī)��、木薯收獲機(jī)和水稻直播機(jī)等樣機(jī)��。共主持科研項(xiàng)目40項(xiàng)���,其中���,國(guó)家基金6項(xiàng),省部級(jí)項(xiàng)目25項(xiàng)�����。發(fā)表SCI���、EI論文42篇��,獲發(fā)明專利授權(quán)21項(xiàng)�。
學(xué)術(shù)帶頭人:楊望���,工學(xué)博士��,副教授�����,中國(guó)農(nóng)業(yè)大學(xué)訪問(wèn)學(xué)者(導(dǎo)師:李洪文教授)?��,F(xiàn)為中國(guó)農(nóng)業(yè)工程學(xué)會(huì)教育委員會(huì)委員,中國(guó)農(nóng)業(yè)機(jī)械學(xué)會(huì)丘陵山區(qū)農(nóng)林機(jī)械分會(huì)委員�����,中國(guó)農(nóng)業(yè)機(jī)械學(xué)會(huì)青年工作委員會(huì)委員�����,中國(guó)熱帶作物學(xué)會(huì)機(jī)械專業(yè)委員會(huì)委員���,熱帶亞熱帶作物機(jī)械化創(chuàng)新聯(lián)盟理事��。主要從事立式超深旋耕(粉壟)��、甘蔗���、木薯��、水稻亞熱帶智能農(nóng)機(jī)裝備和農(nóng)業(yè)機(jī)器人研發(fā)�����。主持和主要參加科研項(xiàng)目21項(xiàng)�����,其中�����,主持國(guó)家自然科學(xué)基金項(xiàng)目2項(xiàng)���,首個(gè)廣西農(nóng)機(jī)國(guó)際合作重大專項(xiàng)1項(xiàng),省級(jí)項(xiàng)目5項(xiàng)�,參加國(guó)家自然科學(xué)基金項(xiàng)目2項(xiàng)。第一/通訊作者發(fā)表SCI/EI論文25篇�����。獲得省級(jí)鑒定成果1項(xiàng),獲得發(fā)明專利6項(xiàng)���,實(shí)用新型專利5項(xiàng)���。
聯(lián)系電話:13557210593
主要成員:黃亦其(博士��,副教授)
陸靜平(博士���,副教授)
陸志恒(博士�,助理教授)
張彪(博士����,助理教授)
鄭賢(碩士,工程師)
潘明章(博士�,教授)
研究方向:
1、甘蔗全程生產(chǎn)機(jī)械
(1)立式超深旋耕(粉壟)機(jī)械
針對(duì)目前立式超深旋耕�����,土壤的破碎程度在高度方向分布不合理����,土塊呈上大���、下小分布,且作業(yè)功耗大�,機(jī)械振動(dòng)大的主要問(wèn)題,團(tuán)隊(duì)與廣西五豐從2015年開始合作�,開創(chuàng)性對(duì)立式超深旋耕刀具進(jìn)行了一系列的減阻優(yōu)化研究,發(fā)表了國(guó)際首篇立式超深旋耕機(jī)的英文論文��,全面詳細(xì)闡明了立式超深旋耕刀具作業(yè)機(jī)理�����,為刀具的優(yōu)化奠定了關(guān)鍵的基礎(chǔ)�����。相關(guān)研究獲得國(guó)家自然科學(xué)基金項(xiàng)目和廣西自然基金項(xiàng)目連續(xù)支持��。

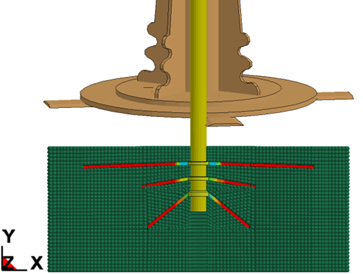
立式超深旋耕機(jī)(2021)
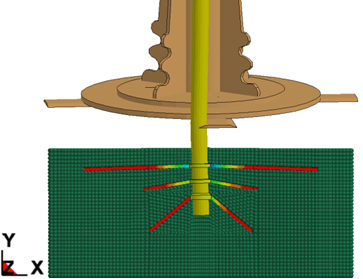
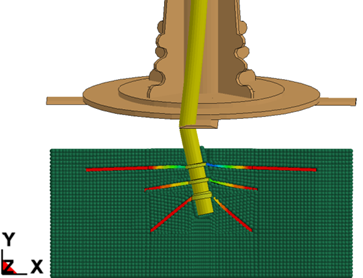
立式超深旋耕作業(yè)仿真
2023年�,團(tuán)隊(duì)獨(dú)立研制出適合我國(guó)蔗田的小型低阻立式超深旋耕機(jī),作業(yè)深度40cm時(shí)�,新型刀具單位幅寬作業(yè)阻力比五豐的減少18%,且還在持續(xù)優(yōu)化。

立式超深旋耕機(jī)(2023�����,獨(dú)立研發(fā))

領(lǐng)導(dǎo)專家現(xiàn)場(chǎng)觀摩立式超深旋耕機(jī)作業(yè)

國(guó)家媒體報(bào)道
(2)種植機(jī)械
依托廣西自然科學(xué)基金項(xiàng)目支持���,為降低甘蔗切割傷芽率���,提高種植精準(zhǔn)度,和不同芽種種植機(jī)械化技術(shù)或包衣機(jī)械化種植技術(shù)服務(wù)�,完成了廣西主要的三種不同糖料蔗的莖節(jié)圖像采集,建立甘蔗-輸送裝置-切割器-攝像頭位置關(guān)系模型����,提出甘蔗莖節(jié)圖像的特征與識(shí)別莖節(jié)的標(biāo)準(zhǔn)特征判斷運(yùn)算方法�����,采用Radon函數(shù)提取甘蔗莖節(jié)邊緣直線����,得到甘蔗莖節(jié)在圖片上的直線像素位置的分布規(guī)律。
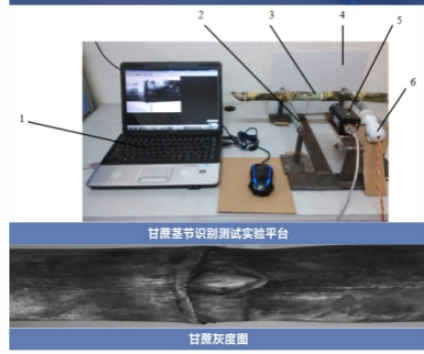
甘蔗切種莖節(jié)識(shí)別
針對(duì)目前種植機(jī)排種不均勻和傷芽率高的瓶頸問(wèn)題�,從2016年起,對(duì)種植機(jī)關(guān)鍵部件排種器進(jìn)行了創(chuàng)新設(shè)計(jì)并創(chuàng)制了3代雙芽蔗段排種器,可實(shí)現(xiàn)2.5根蔗段/秒�����,1-2根蔗段/次的高速勻量排種��。





第一代排種器 第二代排種器 第三代排種器
(3)收獲機(jī)械
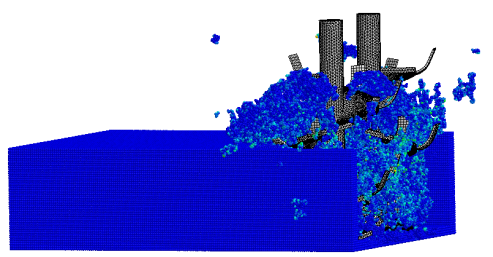
從1998年起��,依托國(guó)家自然科學(xué)基金和廣西自然科學(xué)基金項(xiàng)目連續(xù)支持���,針對(duì)甘蔗收獲機(jī)切割質(zhì)量較低和含雜率較高的問(wèn)題����,與廣西農(nóng)機(jī)研究院進(jìn)行了長(zhǎng)期合作研究�����,研究了切割器復(fù)雜作業(yè)機(jī)理和除雜機(jī)理�����,同時(shí)對(duì)甘蔗切割和除雜系統(tǒng)進(jìn)行了優(yōu)化�。
甘蔗收獲切割仿真
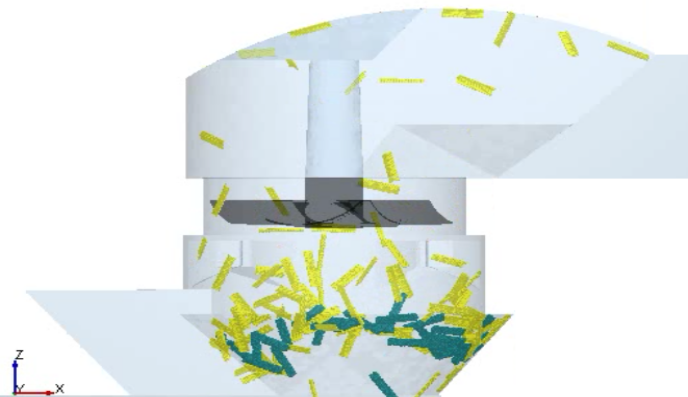
甘蔗除雜系統(tǒng)作業(yè)仿真
近年來(lái),開展了分步式甘蔗收獲成套裝備研制����,現(xiàn)已完成國(guó)家自然科學(xué)基金項(xiàng)目和廣西基金項(xiàng)目2項(xiàng)���,在研廣西重點(diǎn)研發(fā)計(jì)劃項(xiàng)目1項(xiàng)。成果應(yīng)用于拉力式甘蔗剝?nèi)~機(jī)的研發(fā)����,計(jì)劃2024—2025榨季在柳州建立10個(gè)應(yīng)用示范基地。

分步式甘蔗除雜裝置
2����、仿生智能挖拔式木薯收獲機(jī)
2009年以來(lái),依托國(guó)家基金項(xiàng)目�����、廣西科技重大專項(xiàng)(東盟國(guó)際合作項(xiàng)目)和廣西科技廳重點(diǎn)實(shí)驗(yàn)室項(xiàng)目支持����,以廣西有代表性的木薯生長(zhǎng)狀況為對(duì)象�,圍繞丘陵地區(qū)木薯仿生收獲機(jī)械設(shè)計(jì)理論,開創(chuàng)性開展了一系列的研究工作�,發(fā)表論文24篇,SCI/EI收錄14篇����,獲5項(xiàng)發(fā)明專利�,并研制了4代收獲機(jī)樣機(jī)����。形成了一種全新的木薯收獲機(jī)械設(shè)計(jì)理論。

人收獲拔起木薯(高速攝像)

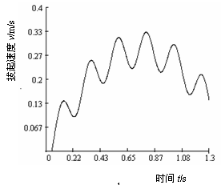
人拔起木薯速度



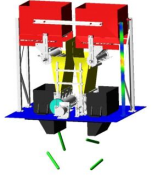
仿生拔起機(jī)構(gòu)拔起木薯仿真

第4代仿生智能挖拔式收獲機(jī)

走出國(guó)門:研發(fā)的木薯機(jī)械在東盟國(guó)家推廣應(yīng)用
3�、電磁振動(dòng)式水稻種植機(jī)械
針對(duì)水稻種植機(jī)械排種排秧不均勻和傷種高的問(wèn)題,開展了一系列的電磁振動(dòng)式水稻種植機(jī)械研究工作����,研制出了水稻電磁振動(dòng)環(huán)型播種機(jī)(1993年)(國(guó)際首創(chuàng))、8行水稻電磁振動(dòng)直播機(jī)(1998年)(全國(guó)農(nóng)機(jī)學(xué)界知名����,并在廣西南部進(jìn)行了一定面積的推廣應(yīng)用)、電磁振動(dòng)水稻擺秧機(jī)(2000年)和電磁振動(dòng)水稻田間拌漿育秧播種機(jī)(2013年)(國(guó)內(nèi)領(lǐng)先)�����。

田間拌漿育秧播種機(jī)
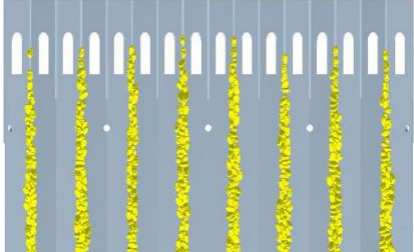
電磁振動(dòng)排種器排種仿真
近年主要研究成果:
1)楊望等.Simulation of forces acting on the cutter blade surfaces and root system of sugarcane using FEM and SPH coupled method[J].Computers and Electronics in Agriculture,2021.( SCI收錄)
2)楊望等.Numerical simulation of spiral cutter-soil interaction in deep vertical rotary tillage[J].Agriculture,2023.( SCI收錄)
3)楊望等.Embedded field stalk detection algorithm for digging–pulling cassava harvester intelligent clamping and pulling device[J].Agriculture,2023.( SCI收錄)
4)楊望等.Effect of root-soil parameters on the lodging resistance of sugarcane(Saccharum officinarum L.)[J].Applied Ecology and Environmental Research,2020.( SCI收錄)
5)楊望等.Numerical simulation of an experienced farmer lifting tubers of cassava for designing a bionic harvester[J]. CMES-computer modeling in engineering & sciences,2015.(SCI收錄)
6)楊望等.Optimized tuber-lifting velocity model (TLVM) for cassava harvester design[J].Advances in Mechanical Engineering,2018.(SCI收錄)
7)黃亦其等. Evaluating Data Augmentation Effects on the Recognition of Sugarcane Leaf Spot[J].Agriculture,2023.( SCI收錄)
8)黃亦其等. Rresearch on sugarcane seed-bud location based on anisotropic scaling transformation[J]. Applied engineering in agriculture,2022.( SCI收錄)
9)黃亦其等. Hyperspectral Imaging for Identification of an Invasive Plant Mikania micrantha Kunth[J]. Frontiers in plant science,2021.( SCI收錄)
10)黃亦其等. UAV and a deep convolutional neural network for monitoring invasive alien[J]. Computers and electronics in agriculture,2020.( SCI收錄)
11)陸志恒等. UAV and a deep convolutional neural network for monitoring invasive alien[J]. Computers and electronics in agriculture,2020.( SCI收錄)
12)陸志恒等. Automatic teat detection for rotary milking system based on deep learning algorithms[J]. Computers and electronics in agriculture,2021.( SCI收錄)
13)張彪等. Design andexperiment ofprofilingfurrow-ridgeterrain bycaneleaf-chopping andreturningmachine[J]. Agriculture,2024.( SCI收錄)
14)張彪等. A DEM-MBD based method for regulating transfer flux in the supply and discharge of cane seed particles[J].Computers and electronics in agriculture,2024.( SCI收錄)
15)黃亦其等.基于光譜分析的甘蔗葉片早期輪斑病與銹病識(shí)別[J].農(nóng)業(yè)機(jī)械學(xué)報(bào)�,2023.(EI收錄)
16)黃亦其等. Gradient-based method for the identification of multi-nodes in sugarcane[J]. Information Processing in Agriculture,2020.( EI收錄)
17)楊望等.種植于紅粘土的木薯塊根挖掘作業(yè)數(shù)值模擬[J].機(jī)械工程學(xué)報(bào),2013.(EI收錄)
18)楊望等.基于改進(jìn)蜘蛛群集算法的木薯收獲機(jī)塊根拔起速度優(yōu)化[J].農(nóng)業(yè)工程學(xué)報(bào)����,2018.(EI收錄)
19)楊望等.木薯收獲機(jī)土薯抖動(dòng)分離裝置性能仿真及試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào)�����,2017.(EI收錄)
20)楊望等.木薯塊根拔起力的力學(xué)模型和數(shù)學(xué)模型分析[J].農(nóng)業(yè)工程學(xué)報(bào),2011.(EI收錄)
21)楊望等.入土切割對(duì)甘蔗切割過(guò)程影響的仿真試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2011.(EI收錄)
22)黃亦其等.基于Bayes決策的甘蔗種芽完好性檢測(cè)與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2016.(EI收錄)
23)黃亦其等.基于感應(yīng)計(jì)數(shù)的甘蔗種切割防傷芽系統(tǒng)的設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2015.(EI收錄)
24)楊堅(jiān)等.電磁振動(dòng)式拌漿育秧水稻芽種播種機(jī)優(yōu)化試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2012. (EI收錄)
科研項(xiàng)目:
1)國(guó)家自然科學(xué)基金項(xiàng)目:蔗蔸田超深旋耕部件作業(yè)機(jī)理及優(yōu)化研究,2022-2025.
2)國(guó)家自然科學(xué)基金聯(lián)合重點(diǎn)項(xiàng)目:面向復(fù)雜丘陵地貌的小型化甘蔗收獲機(jī)自主作業(yè)與協(xié)同優(yōu)化控制研究,2024-2027.
3)國(guó)家自然科學(xué)基金項(xiàng)目:面向甘蔗植物學(xué)特征多樣性的仿生剝?nèi)~方法及其機(jī)理研究,2020-2023.
4)國(guó)家自然科學(xué)基金項(xiàng)目:基于數(shù)值模擬的甘蔗倒伏動(dòng)力學(xué)機(jī)理研究及影響因素綜合優(yōu)化,2016-2019.
5)國(guó)家自然科學(xué)基金項(xiàng)目:木薯收獲機(jī)械多元耦合仿生塊根拔起系統(tǒng)設(shè)計(jì)方法,2014-2017.
6)國(guó)家自然科學(xué)基金項(xiàng)目:丘陵地區(qū)木薯塊根收獲機(jī)械基礎(chǔ)理論與設(shè)計(jì)方法,2011-2014.
7)廣西科技重大專項(xiàng)(國(guó)際合作項(xiàng)目):木薯生產(chǎn)全程機(jī)械化技術(shù)在老撾轉(zhuǎn)移示范,2023-2026.
8)廣西重點(diǎn)研發(fā)項(xiàng)目:智慧農(nóng)機(jī)動(dòng)力域控制系統(tǒng)關(guān)鍵技術(shù)開發(fā)及應(yīng)用,2021-2023.
9)廣西科技攻關(guān)項(xiàng)目:用于高速插秧的田間芽種精密播種機(jī),2011-2013.
10)廣西自然科學(xué)基金項(xiàng)目:雙螺旋葉片粉壟工作部件的作業(yè)機(jī)理及優(yōu)化研究,2023-2026.
11)廣西自然科學(xué)基金項(xiàng)目:基于主動(dòng)深度學(xué)習(xí)的切割甘蔗宿根破頭損傷識(shí)別模型構(gòu)建與智能監(jiān)測(cè),2021-2024.
12)廣西自然科學(xué)基金項(xiàng)目:基于生物形態(tài)特征的甘蔗徑向剝?nèi)~方法及其機(jī)理研究,2019-2021.
13)廣西自然科學(xué)基金項(xiàng)目:蔗田粉壟機(jī)械關(guān)鍵作業(yè)部件作業(yè)機(jī)理及優(yōu)化,2018-2021.
14)廣西自然科學(xué)基金項(xiàng)目:雙目視覺的甘蔗種植切割防傷芽視覺識(shí)別與定位系統(tǒng)研究,2014-2017.
15)廣西自然科學(xué)基金項(xiàng)目:甘蔗倒伏力學(xué)機(jī)理及調(diào)控方法研究,2014-2017.
16)廣西創(chuàng)新驅(qū)動(dòng)發(fā)展專項(xiàng):甘蔗農(nóng)機(jī)農(nóng)藝融合規(guī)?����;a(chǎn)技術(shù)示范,2017-2020.
17)廣西科技基地和人才專項(xiàng):中國(guó)荷斯坦奶牛乳頭識(shí)別定位與自動(dòng)套杯關(guān)鍵技術(shù)研究,2023-2026.


